
|
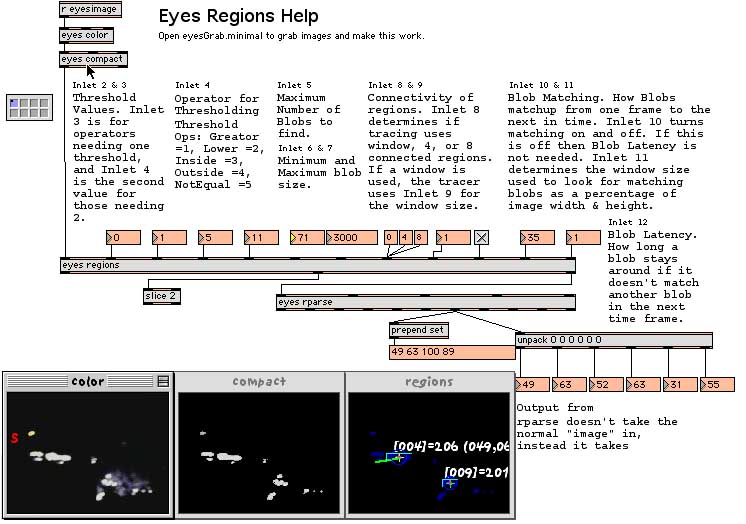
| eyes regions | Tracks regions in an image. |
Converts an image to a list of regions. Tracks these regions over time. Calculates location, size velocity, extents, age. Matches regions from one frame to the next.
| Inlets & Arguments: |
|
|
Name |
|
Description |
|
|
image |
|
Eyes Image, standard operator messages see: eyes messages |
|
|
threshold 1 |
|
Turns adaptive backgrounding on and off. 0=off 1=on. |
|
|
threshold 2 |
|
Attempts to preserve the image intensity values. (Doesn't work well in practice) |
|
|
operator |
|
Number of frames used to integrate in order to obtain a background. c = (f[0] + f[1] + ... + f[n])/n. Where c is the integrated background and f[x] is a frame in time, and n is the number of frames to integrate. |
|
|
maximum number of regions |
|
Once frames are integrated, this is the percentage of that image that is integrated into the current background. Greator =1 Lower =2 Inside =3 Outside =4 NotEqual =5 |
|
|
minimum region size |
|
Minimum size of regions to track. |
|
|
maximum region size |
|
Maximum size of regions to track. |
|
|
connectivity |
|
Determines how regions are constructed. Specifies how neighboring pixels are grouped together to form blobs. 4 = 4-connected (left, right, top, and bottom pixels are grouped if within threshold) 8 = 8-connected (4-connected but with corner pixels included) -1 through -8 = one direction trace in one of eight directions: -1 -2 -3 -4 pix -5 -6 -7 -8 0 or any other value: use inlet 9 to determine a window around the pixel to search for like pixels to group into a blob. |
|
|
window |
|
If connectivity is 0, use this value to determine the size of an area around each pixel to find like pixels to group into blobs. |
|
|
matching on/off |
|
Turns region matching on or off. Region matching is used to match blobs from the previous frame to the current frame. Matching is based upon how close blobs are spatially. 0 = off 1 = on |
|
|
matching window |
|
Percentage of the frame size represnting how far away matching regions can be matched. |
|
|
region latency |
|
Helps with blob matching. If a region/blob doesn't match in the current frame, it can be made to "hang around" for a little bit in case a match happens to crop up. Region latency determines how long a blob will hang around when it doesn't match any blobs in the current frame. |
| Outlets: |
|
|
Name | Description |
|
|
region marked image | Image with regions marked with id colors. |
|
|
region sizes and locations | Size and location of each region found as a Max list of integers. |
|
|
region list | Region list data type. Represents a list of regions and values associated with them such as size, location, velocity, etc. |
| Messages: |
| Standard messages |
| Accepts all messages sent to the eyes object. See eyes messages. |
| Argument messages |
| Accepts all inlet arguments as messages. |
| Example: |
| See Also: |
| rsizesel, rparse, color, compact, background, threshold |